

Application Of Mathematics In Robotics Pdf
Mathematics Behind Robotics
![]()

Robotics research has been increasing exponentially and marking a new industrial revolution. Today, above one million robots are operating globally and the number is growing with time.
Today we have many robots with brainpower comparable or even beyond human intelligence, physical capability, perception, and behavior. And in some areas like computer-aided surgery, these intelligent machines can even surpass human capabilities.
From handling hazardous materials to welding components, performing administrative tasks like, filing documents for customers, or vacuuming carpets, Robots are playing many essential roles in society.
But what makes them do all the ingenious things? Several aspects of mathematics, engineering, and physics make the magic happen.
When did the Robots Introduce to the world?
The study of robotics is as old as the earliest mathematical studies. The word "robot" was introduced to the world in 1920 by a play named as "Rossum's Universal Robots" by Czech writer Karel ÄŒapek.
In the 18th century, Leonardo da Vinci designed a programmable robot that could move its limbs, twist, and sit. The 19th century brought significant contributions to robotics with the work of Charles Babbage (an English mathematician and inventor of the programmable computer), and Ada Lovelace (created programs for Babbage's analytical engine.)
In the 20th century, Norbert Wiener, Alan Turing, John von Neumann, and Claude Shannon, lead to an explosion in robotics innovation.
Now, Robot Technology is widely used in the industry. We have Mobile robotics, industrial robotics, field robotics, and advanced robotics that can works its way around a room, detect light, smells, reach out and grab, learn and recognize things or even expressions, mimics the human brain, and much more.
What is a Robotic System?
In mathematical aspects, a robotic system is a complex system represented by functions in multiple subsystems. It is the intelligent connection between perception and action and classified according to its mobility attributes. The more difficult the mathematical concepts are, the more flexibility arises in a robotic system.
The application of mathematics in Robot modelling, planning, and Control
Those who want to study robotics should do their best to understand mathematics because it is a necessity in robotics research. To find the correct sized parts, the measurements to perform the tasks, to test out the performance, or to detect the patterns and relationships between speed and power, or wheel diameter and distance traveled, you need to understand some essential mathematical concepts.
The fundamental math prerequisites for Robotics are:
- Calculus
- Ordinary differential equations
- Advanced Linear algebra
- Geometry
- Numerical analysis
Here are some aspects of mathematical concepts that help a robot perform all the operations efficiently.
Transformation Matrices help Change the Coordinate Systems in Robotics.
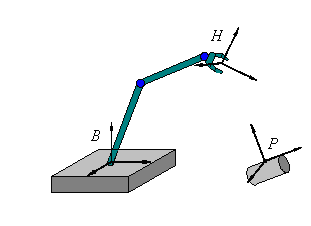
To perform a specific action, a robot changes its coordinate system. That's why robotics problems have more than one coordinate system. In the picture shown above, there are three attached coordinate systems, B the robot's base, H its hand, and P the piece that the robot must hold. The systems are connected in the sense that if you move the base B, hand H or the piece P, the corresponding coordinate systems move with it.
The Coordinate system P locates points on the cylinder
The Coordinate system B describes the location of the hand
The Coordinate system H measures distance from the hand
The main focus is to determine the position and orientation of the piece P relative to the robot's hand H so that the hand moves correctly to grasp the piece.
To compute this, it is vital to know the position and orientation of the hand relative to the base, so the hand correctly oriented to grasp the piece.
A transformation matrix can be used in this case, to describe the location and orientation of the second coordinate system P with respect to the first coordinate system H.
Consider a transformation matrix,
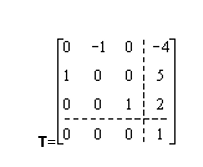
This transformation matrix can be used to define the orientation and location of a second coordinate system P relative to the first coordinate system H. The matrix T is applied to the endpoints of the unit vectors and origin of the first coordinate system,
The unit vectors are i=1, j=1, and k=1,
The transformation matrix of the first coordinate system with unit vectors i, j, and k and origin is represented as,
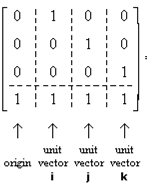
Multiply the transformation matrix T with the first coordinate system to obtain the origin and the endpoints of the unit vectors (i', j', k') of the second coordinate system.


The picture shows that the point P is located at (x' = 2, y' = 1, z' = 1) in the second coordinate system and at (x = -5, y = 7, z = 3) in the first coordinate system.
Let's consider the Robot's Hand is picking up a piece
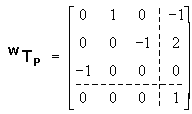
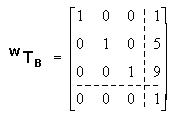
The coordinate system, P, attached to the piece is positioned relative to the world of coordinate systems, let's call it W, and is shown by the transformation matrix,
While the base, B, of the robot is positioned relative to the world coordinate systems, is demonstrated by the transformation matrix,
To grasp the piece, the hand frame and the piece frame has to align, and the purpose is to find that transformation matrix that represents the alignment.
Let's Find the Transformation matrix.

Look at the figure that shows the movement of a robot while grabbing the piece. When the robot's hand grasps the piece P, the bot frames get aligned which means,

Now consider the fact that the transformation from the world, W, to the base, B, and the conversion from the base B, to the hand H, can be joined into one transformation from the world, W, to the hand, H, which is represented as,
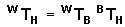
Putting the known matrices,

Solving this matrix equation for conversion from the base to the hand is expressed as,
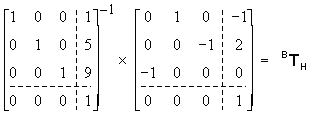
Or,
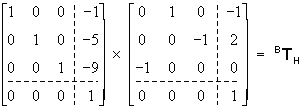
Resulting in the final transformation matrix,

Keep in mind that the three columns of the 3x3 submatrix represent the orientation of the hand coordinate system respective to the robot's base coordinate system. While the last column indicates the origin of the hand coordinate system respective to the origin of the base coordinate system.
A framework to control a Robotic Dog with a set of ordinary differential equations

Non-linear dynamical systems provide creative possibilities to control the locomotion in quadruped or legged robots. The non-linear dynamical system represents the similarity with the neural structure of living beings. While a dynamical system itself is a collection of multiple systems that are linked with each other and the robot's actuators and sensors, you could consider this collection of a dynamical system as a collection of neurons in a brain. When the brain has a sensory input, it generates signal patterns. Following this approach, the neural network of animals can be obtained, and it is useful to know the behavior of animal-like robot (Robotic Dog in this case) containing learning abilities and adaptive locomotion.
To control the Robotic dog, let's create a framework with a set of dynamical systems. Let's move the robotic Dog's legs without making it walk and touching the ground.
To do this, put the Robotic dog on a rectangular box, so the legs move freely without touching the ground as shown in the picture below.

The goal is to achieve the synchronization of the two leg's movement and it can only be obtained if the frequency of the movement driven by the human user at one leg is close enough to the intrinsic frequency driven by the ACPO at the other leg. This scenario indicates that the Robotic Dog is controlled by a differential system because when a human user control one oscillating leg of the robotic dog it gives a perturbation input.
Consider,
x = the position of the left front leg which is controlled by ACPO
x˙ = the position of the right front leg
y = the position of the left back leg
y˙ = the position of the right back leg
k= the coupling constant
The oscillator is represented as,
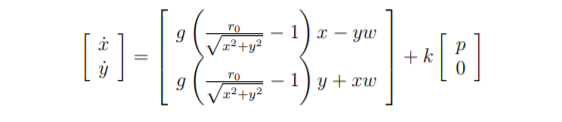
Where:
• p is the right fore leg's position input;
• parameters: — g = 10 is the oscillator's gain;
– r0 = 1 is the oscillator's radius;
– w = 2π is the oscillator's intrinsic frequency.
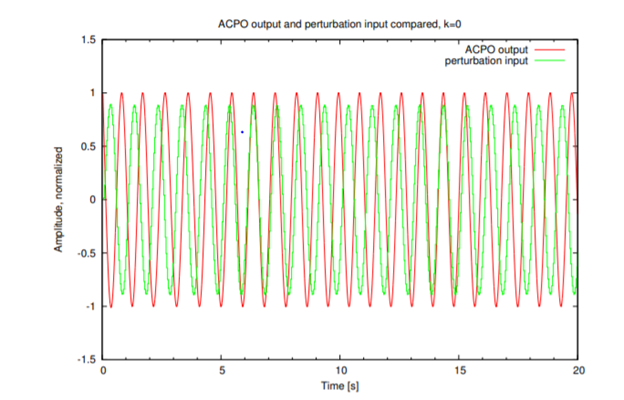
The trails are made with different values of k and the higher the value of k, the stronger the coupling between the legs.
At certain value of k, the coupling will be chaotic.
Here are the graphs that show synchronization of legs at different values of coupling constant k,
In this graph, For k = 0, no synchronization is observed.
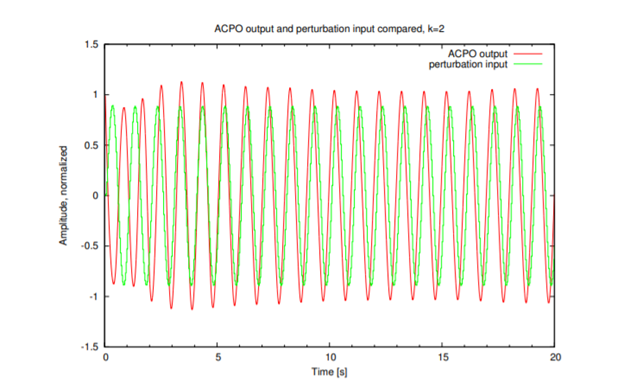
For a run with k = 2 the best synchronization after a few seconds is being observed as shown in the graph below,
Concluding Remarks
Mathematics performs a significant part in robotic modelling, planning, and execution. The robotic scientists know how to deal with these complex equations and form a software framework to create more advanced and functional Robotics of the century. It's essential to invest in research and development in robotics to have the most growth in the economy as it is estimated that 10 to 15 years from now, the world is going to be all Robotic and you will see your self dwelling among these intelligent machines.
Application Of Mathematics In Robotics Pdf
Source: https://medium.datadriveninvestor.com/mathematics-behind-robotics-9d1790b33828
Posted by: brownveng1944.blogspot.com
0 Response to "Application Of Mathematics In Robotics Pdf"
Post a Comment